3、蜗轮蜗杆Adams建模方法
基于上述Adams中齿轮传动比的定义方法,让Common Velocity Marker的Z轴方向体现蜗杆速度与蜗轮的夹角即可,具体方法如下:
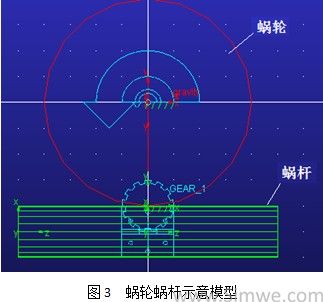
建立如下蜗轮蜗杆模型:
其中齿轮传动比Common Veloctiy Marker为Ground上的Marker_7。
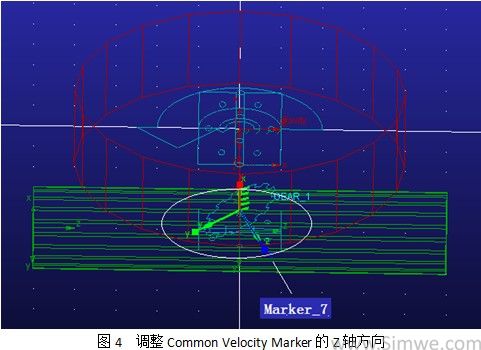
调整Common Velocity Marker的Z轴方向。
目前Marker_7的欧拉角参数为(0,0,0),即其Z轴方向与绝对坐标系Z轴方向平行,让其绕Y轴方向旋转就好,例如升角为60°,则该标记绕Y轴选择30°,其欧拉角参数为(90,30,0)。
至此,蜗轮蜗杆模型建立完毕,可以通过 检验仿真结果是否准确,毫无疑问是正确的!
检验仿真结果是否准确,毫无疑问是正确的!