1、蜗轮蜗杆传动机理
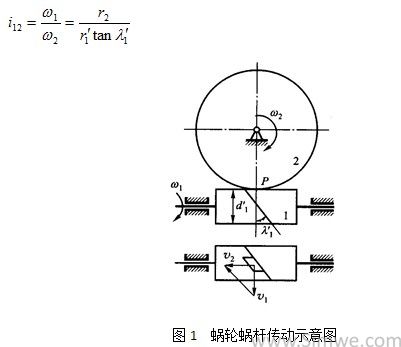
如下图所示,节点P为蜗轮蜗杆的啮合点,蜗杆和蜗轮在P点的速度分布为V1和V2,由图可知:

其中 为蜗杆的分度圆半径,
为蜗杆的分度圆半径, 为蜗轮的分度圆半径,为蜗杆节圆螺旋线的升角,则蜗轮蜗杆传动比为:
为蜗轮的分度圆半径,为蜗杆节圆螺旋线的升角,则蜗轮蜗杆传动比为:
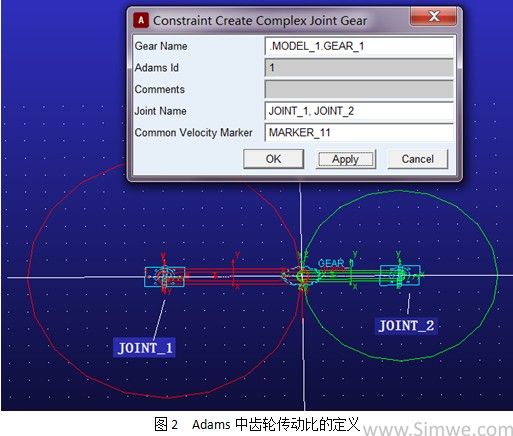
2、Adams齿轮传动比定义
蜗轮蜗杆属于齿轮传动的范畴,在Adams中对其进行建模,首先必须搞清楚Adams对齿轮传动比的定义方法,蜗轮蜗杆相比于一般齿轮的区别仅仅在于螺旋升角,一般齿轮在啮合点的速度反向相等,蜗轮蜗杆在啮合点的速度方向垂直,速比与成反比。
下图是Adams齿轮传动比定义对话框,因为齿轮传动比实际上就是两个齿轮的旋转约束速比,因此Joint Name中输入齿轮的旋转约束名,Common Velocity Marker的作用有两个:(1)所选的标记标示啮合点位置,因此齿轮的分度圆半径实际是该标记与旋转约束I/J标记的距离;(2)该标记的Z轴方向标示啮合点速度方向,注意该标记必须定义在齿轮箱或机架这样一个共同参考体上,本例中定义在ground上。