2.2 仿真系统模型建立
本文以奇瑞公司某款微车为例, 在ADAMS 中建立整车的动力学模型, 并与Matlab/Simulink 进行联合仿真,构造了图2 所示的转向助力模糊控制框图。
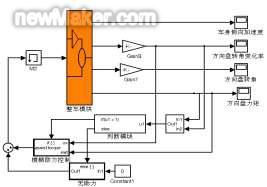
图2 转向助力控制框图
3 主动回正控制策略设计
3.1 主动回正控制策略设计
由于电动助力转向系统以电机作为执行器,而电机的惯量和阻尼又对系统的回正性能有比较大的影响,因此,必须在基本助力控制的基础上,引入其它控制策略,改善系统的回正性能。主动回正主要包括两个方面:一是回正控制,当车辆低速行驶时,依靠电机施加外力矩,是转向盘迅速准确的回到中间位置。另一个是主动阻尼控制,当高速回正时,为防止超调,利用电机的转矩对系统的阻尼作用,使方向盘回到中间位置而避免超调[4,5]。
本文用模糊控制和PD 控制分段控制的方法对整车的回正性能进行控制。当车辆进入回正过程后,如果方向盘转角大于某一阈值时,使用响应速度快、易于调节的模糊控制进行控制。当转向盘转角小于某一阈值时,使用控制精度高、动态性能好的PD 控制。主动回正控制原理如图3 所示。
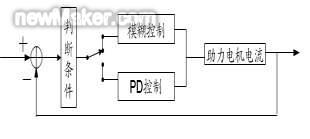
图3 回正控制的分段控制图
3.2 控制器的设计
回正控制以方向盘转角作为关注对象,因此选择转向盘转角及其变化率为输入,以助力矩为输出。控制器同样采用Mamdani 推理方法。考虑对回正性能快速与准确性的要求,将方向盘转角20 度作为模糊控制与PD 控制的分界点。
此处仍然使用三角形函数形式作为输入输出变量的隶属度函数。对于方向盘转角,由于方向盘转角在正常行驶情况下,一般在左右转1 圈内运动,因此需要对于此区间的三角形函数设计的比较窄瘦些,使此处的变量反应更灵敏些。对于方向盘转角变化量,我们比较关心方向盘转角回正速度较大时其对车辆回正超调性能的影响。因此,需要将方向盘转角变化率较大的区域内的隶属度函数处理的窄瘦些。输出助力矩的隶属度函数则在中间区域内采用均布的较两侧细密的等腰三角形函数形式。
依据转向盘回正规律,制定模糊规则表。
对于PD 控制部分,需要根据车型不断调试控制系数。既要保证车辆回正性能的要求,又要避免驾驶员在整个回正过程中操舵力出现跳跃变化。
4 控制策略结果验证
4.1 转向助力控制策略的分析验证
基于转向助力的联合仿真模型,对整车进行正弦波转角输入用来模拟车辆变线时的操作。分别分析了21km/h、40km/h、65km/h、80km/h 和97km/h 下,转向助力施加后车辆侧向加速度达到0.3g 时方向盘力矩值的大小。本文以通用公司1999 年测试的0.3g 时理想的转向盘力矩为初步参考目标,图3 为带助力控制的车辆转向力矩与目标值的对比情况。由图3 可见,加入助力控制后的方向盘力矩值与理想力矩差距很小。图4 为车速在65km/h 时,车辆对于正弦转向角输入产生的转向盘力矩响应在有、无助力两种情况下的对比图。从图4 可见,助力转向系统在驾驶员换道或避障操作时,有效地减轻了转向手力,并且保证了小力矩范围内的路感没有受到影响(出于保密原因,本文对部分结果数据进行了处理,仅供参考)。
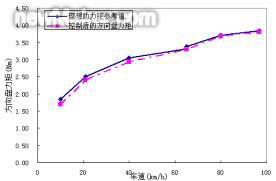
图3 助力控制与目标值对比 图4
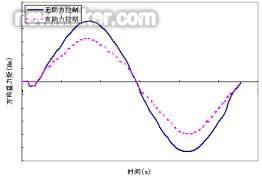
图4 65km/h 时转向盘力矩对比
4.2 主动回正控制策略的分析验证
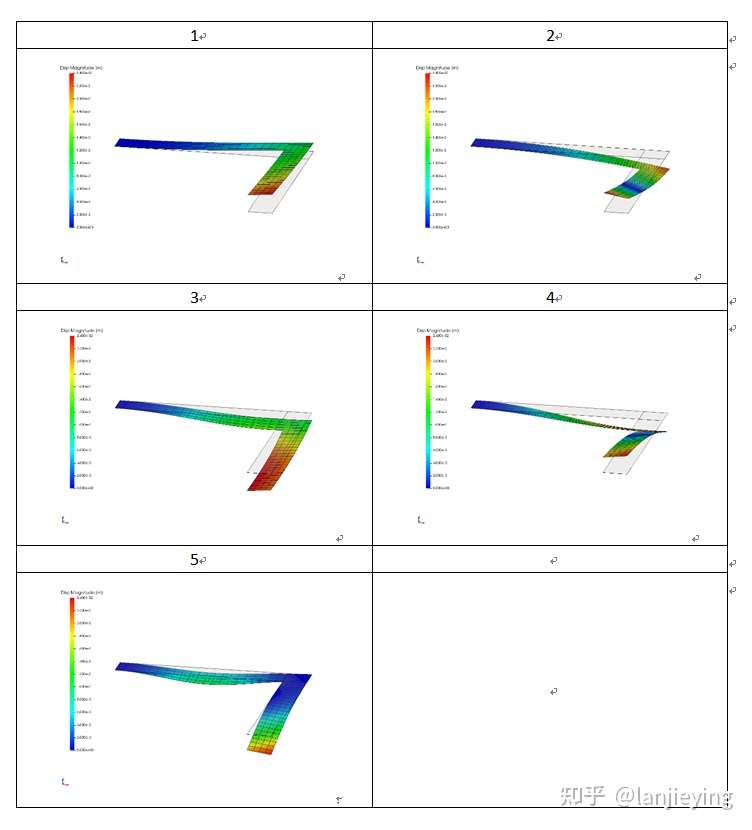
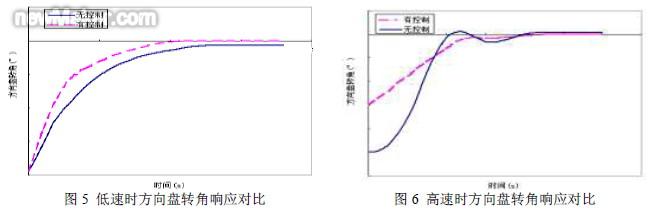
为便于评价控制后的回正效果,分别仿真车辆在低速(v=20km/h)及高速(v=80km/h)下有、无回正控制下车辆回正情况。使汽车分别在低速及高速情况下沿某一圆弧路径行驶,模拟汽车回正过程中的转向盘转角的变化情况。图5、6 分别表述了车辆在低速及高速过程中方向盘转角的变化情况。由图5 可见,在汽车在低速转弯回正时,分段控制能快速、准确的回正,消除了原有的回正不足现象。由图6 可见,汽车在高速回正时,出现了回正超调现象,经过控制后,明显改善了原有的回正超调现象。
5 结论
通过理论分析及联合仿真结果,得到以下结论:
1)以模糊控制为基础的电动助力转向系统可以获得不同的助力特性,满足车辆不同工况下行驶时转向轻便性和良好路感的需求。
2)在主动回正控制方面,设计了基于转向盘转角的分段控制方法,利用了模糊控制和PD控制的各自优点,实现转向盘转角的快速、准确回正。
3)由仿真分析对比结果验证了该方法的可行性,可以为电动助力转向概念设计和实车性能调校开发提供控制策略方案优化,从而提高工作效率、缩短开发周期。
参考文献
1. 张昕. 电动助力转向助力特性的仿真分析[D]. 吉林大学汽车工程学院, 2003:53-70.
2. 王秀雷,毛务本. 模糊控制理论在EPS 控制中的应用[J].拖拉机与农用机械. 2006(1)
3. Gary P. Bertollini, Robert M. Hogan. Applying Driving Simulation to Quantify Steering Effort Preference as a Function of Vehicle Speed. SAE. Paper No. 1999-01-0394.
4. 曾群,黄菊花. 汽车电子助力转向的模糊PD 控制器设计[J].汽车电子. 2007
5. 孟涛,等. 电动助力转向系统的回正与阻尼控制策略研究[J].汽车工程. 2006