主动安全系统可以根据其与驾驶员的交互程度或对驾驶控制的干预来分类。例如,有些主动系统会自动启动(如ESC电子稳定系统),而另一些则是向驾驶员提供信息或发出警告,充当着驾驶辅助系统的角色。详细地说,自动控制功能,即与车辆动力学相关的控制功能,驾驶员可能感觉不到它们的存在——就像自动变速汽车自动为驾驶员执行了手动挡汽车的换挡任务一样。ESC是一种不需要驾驶员干预的自动稳定控制系统。而信息提供功能,就是纯粹的信息系统,它只向驾驶员提供有用的信息,从而提高驾驶员的态势感知能力,比如天气助手、结冰路面状况等信息。处于二者之间的是各种干预程度不同的安全和舒适系统。这些系统可能警示驾驶员,提供纠正建议,或者进行部分(譬如触觉)控制(即如辅助制动)。例如,多家厂商最近推出的车道偏离预警系统就能够在汽车偏离车道时警告驾驶员。一般而言,安装在后视镜后方的摄像头会扫描前方道路上的车道标志,并由一个视觉信息处理单元判定汽车是否越线,且仅在驾驶员未通过转向灯表现出换道意向时启动采用蜂鸣声或可视的警告系统。许多驾驶员辅助系统均为驾驶员提供信息和警告信号的方式,且可自由选择是否启用。
如以上各例所示,安全系统可以处于信息、警告、半自动控制,或全自动控制四个层面。每个层面在驾驶员和汽车之间的交互和干预类型是不同的:
|
主动系统的分类层次
|
功能或任务
(感测、估算、计算层面)
|
与驾驶员的交互性或对驾驶的干预程度
(操作层面)
|
|
信息
|
感测环境、道路、天气;检索实时或历史数据
|
增强态势感知和条件监控:显示和呈现相关信息
|
|
警告
|
感测环境状况,评估情况和潜在危险;确定采取措施的时机和方案,以及提供纠正措施
|
向驾驶员发出潜在危险的警告,并建议可行的纠正措施(减速、制动、转向)
|
|
半自动控制
|
感测环境状况,评估情况和潜在危险;确定采取措施的时机和方案以及提供纠正措施
|
同时提供警告和实施部分控制功能(施加部分制动力,变紧油门以阻碍加速)
|
|
全自动控制
|
感测环境状况,评估情况和潜在危险;确定采取措施的时机和方案以及提供纠正措施
|
根据需要应用汽车控制功能,比如自动制动、ESP等
|
主动系统还有其他分类方法。其中一种,以汽车碰撞前后的时间区间对这些技术进行分类。在这种方法中,针对不同的时段设计不同的安全系统或模式。比如碰撞或事故发生前的时刻,系统根据可预防性碰撞、可能发生的碰撞,以及迫近碰撞这三种不同情境区分,针对不同的情境启动相应的主动安全系统。
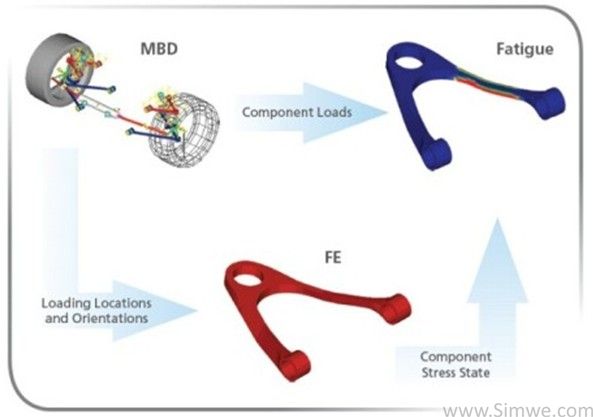
作为汽车安全策略的一部分,各种被动和主动安全系统被自动集成起来,以增强安全性。例如,配备预紧装置的安全带,可以在汽车防碰撞雷达检测到迫近碰撞情况时提前启动,把车内人员更牢固地系在座椅上,从而降低伤害风险。但这只是安全集成策略众多模式中一个简单的例子。

图 车与基础设施的通信模型
从整体去看集成安全,传感器可以提供额外的状态监控和态势感知功能。安全算法基于传感器所收集的数据,用各种确定性和随机的方法进行评价、评估、估算、感知和判断。这些算法可以提供最优化、最安全的纠正措施,类似于熟练驾驶员在紧急状况下会做出的判断。这些判断可充当智能副驾驶的角色,最后转换成具体的车辆控制操作(如制动、转向等)。互动/干预/驱动的实际功能是安全系统设计的一部分。如上表所示(从信息层和警告层到完全控制层),其执行层次可能不尽相同。
车辆间以及车辆与基础设施之间的数据通信正推动着新一波的汽车安全技术革 命。一些设备制造商已示范了其车辆通信技术。该技术可以向驾驶员发出路口碰撞警告,减少驾驶员因视觉盲点而导致的事故。目前,相关机构正在评估DSRC(专用短程通信技术)和其他通信协议对于不同安全应用的适用性。美国交通部在其智能驾驶计划(IntelliDrive)的指导下,正在进行现场操作试验和协作研究,以推动未来的标准制定。许多其他集成安全系统也将不断涌现:车道偏离控制、偏道警告和控制、辅助制动、盲点警告、路口碰撞警告、智能速度顺应系统、驾驶员困倦检测和警告、违例驾驶员辅助等。这些技术有些已经上市,有些还处于开发之中。
毫无疑问,先进的集成安全系统已在原型车和实验室环境下被证实其降低危险的效力,并将给用户带来实际利益。由于目前还没有一个适用的统一性能标准,阻碍了主动安全技术的进一步发展和普及。新车碰撞测试(NCAP)的典型试验(美国交通部公路交通安全管理局NHTSA的新车评估计划),虽然可以为汽车提供碰撞标准评级,但目前仍需要对这些新型的主动安全技术进行评估。需要指出的是,为主动安全系统制定合适的标准是个非常复杂的问题,因为整体系统存在差异,制造商之间又缺乏统一的标准。而由于驾驶员交互系统本身也非常复杂,从而使得解决驾驶员的适应问题难上加难。我们还需要更多的研究和评估,才能针对这些技术制定创新、有效的标准。
作者:Azim Eskandarian教授,理学博士
IEEE会员、IEEE智能交通系统(ITS)协会会员
乔治华盛顿大学工程与应用科学学院教授