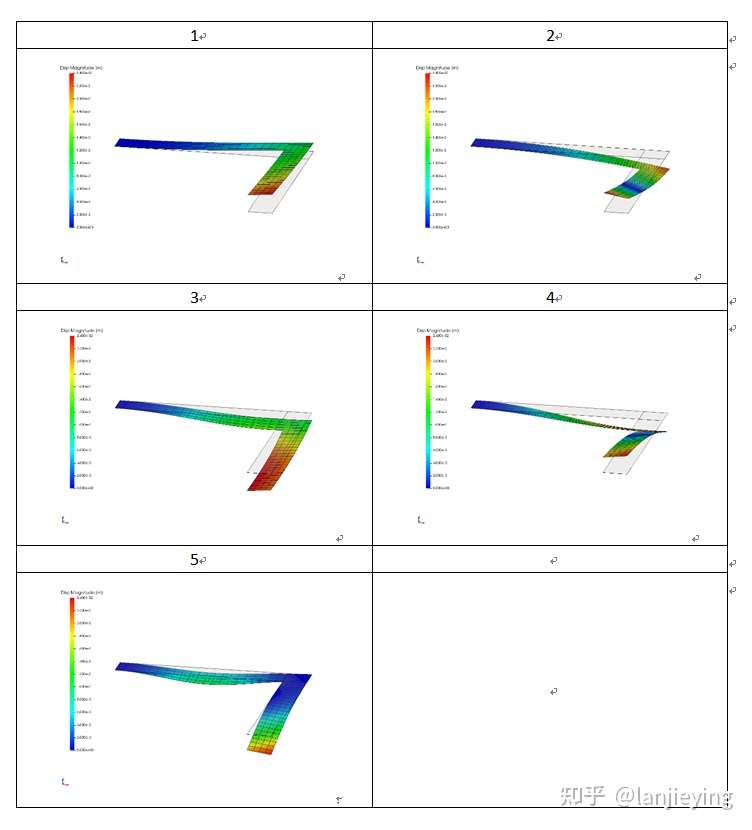
从上面的图表中,可以看出:
① op2和xdb中的载荷加载步与master中的时间步每步的应力和位移的结果一致;
② 从表2中可以看出, 选用和不用壳元剪切修正项(Shell Shear Correction),计算结果基本一致,说明该选项对薄板的结果修正不明显;
③ 上面十种情况板子都大约扭转到70 0 (1.21rad),此处结果开始发散;
④ 当把非线性控制参数的迭代步长调到更小(正如表1所示),在twist401g.sts中,可以看到扭转角有一个由正到负,又由负到正的变化:
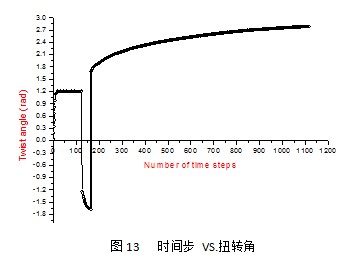
从图13中,可以看出,随着加载步的不断增加,即扭转角接近700时,转动位移有一个阶跃的突变(这可能由材料本身或缺陷引起),当最小自适应迭代步长选取大值时,计算无法跟踪这一细微变化,故计算发散。
3)Fixed 迭代法
Case 6:Pure Full Newton矩阵更新,采用patran界面的默认设置,计算结果收敛。
Case 7:Automatic矩阵更新,结果收敛。
非线性控制参数设置如下,:
NLPARM 1 AUTO 100 500 UPW YES
.00001 .00001 .00001 300
350
Case 8:Controlled Iters矩阵更新,采用patran界面的默认设置,计算结果收敛。
Case 9:Semi-Automatic矩阵更新,结果收敛。
采用如下非线性控制参数:
NLPARM 1 SEMI 1 250 UPW YES
.000001 .000001.000001 300
500

Case 10:Full Newton矩阵更新,采用patran界面的默认设置,计算结果收敛。

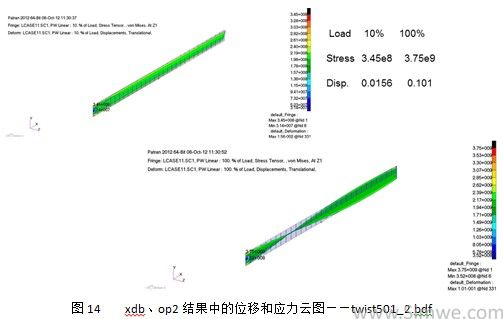
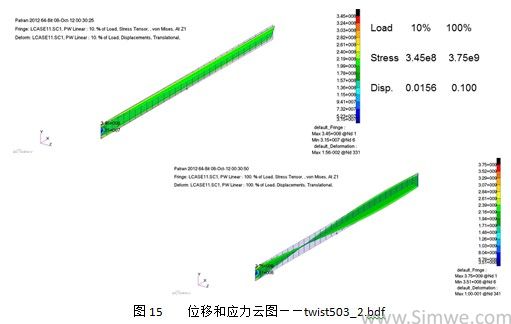
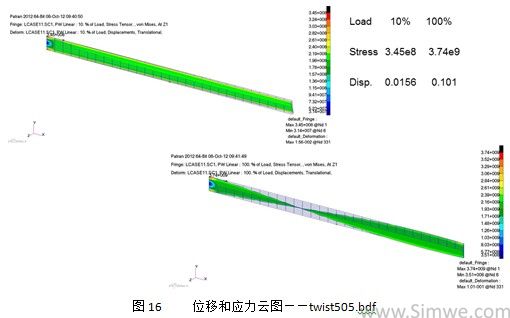
根据收敛情况提取的位移和应力随载荷步(或时间步)的变化情况,如下: