上面的优化过程结束后会得到一个结构的最大频率特征值f作为下一步多刚度拓扑优化中的额外约束。
2.2 静态多工况刚度拓扑优化模型
通常把刚度的最大化问题等效为柔度的最小化问题来研究,静态多工况刚度拓扑优化模型为:

式中:m为摆臂所受载荷工况的总数; 为第k个工况权重值;
为第k个工况权重值; 为惩罚因子,;
为惩罚因子,; 为容差系数取8%;
为容差系数取8%; 为第k个工况的柔度目标函数;
为第k个工况的柔度目标函数; 对应第k个工况下柔度的最大值和最小值。
对应第k个工况下柔度的最大值和最小值。
3 拓扑优化结果
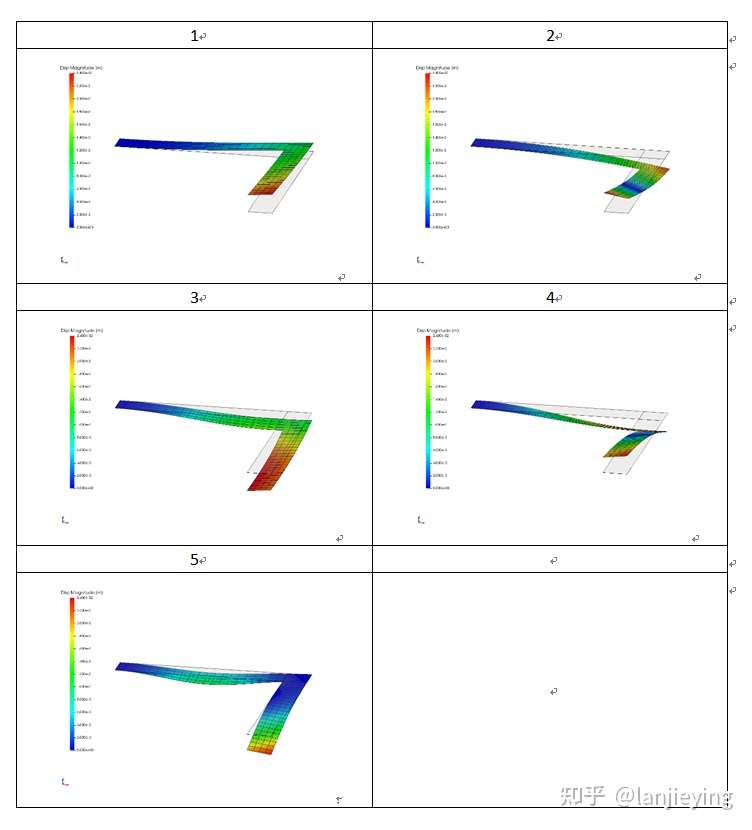
在迭代过程中一阶固有频率的变化曲线如图3所示。以一阶模态频率最大化为优化目标的拓扑优化结果如图4所示。

经过一阶频率最大化为目标的拓扑优化后,设计区域中的低密度区域被去除,留下的高密度区为双叉臂结构,在此基础上进行柔度最小化优化,各工况下目标函数迭代曲线如图5~图10所示。


以柔度最小化为优化目标的拓扑优化结果如图11所示,经过几何处理以及修饰最终得到的摆臂几何模型如图12所示。