薛劲橹 王红岩 迟宝山
装甲兵工程学院 北京 100072
摘要: 以多工况下的构件柔度和一阶模态频率为目标函数,对车辆悬架下摆臂进行多目标拓扑优化。基于SIMP变密度的拓扑优化方法,首先进行自由振动工况下的频率优化,然后以此为基础进行静态工况下的柔度优化,最终得到了同时满足静态柔度最小和振动低阶频率最高要求的悬架摆臂拓扑结构。
关键词: 悬架;拓扑优化;变密度法;频率;柔度
0 前言
悬架摆臂是车辆悬架系统的重要安全件和功能件。在摆臂的设计中,其强度、固有频率以及纵向(车辆的前后方向)和横向(车辆的左右方向)的刚度必须要满足指定要求,所以对摆臂的优化显得很重要,应尽量满足结构轻量化的前提下,其柔度和固有频率等也满足一定的要求。这类优化问题属于典型的以静力学中的柔度最小化和动力学中的特征值最大化作为优化的目标函数的多目标拓扑优化问题。本文中借助有限元软件HyperWorks的结构优化模块OptiStruct,优化得到同时满足多工况条件下柔度最小和低阶频率最高的摆臂拓扑结构
1 摆臂的优化设计建模
1.1 载荷的确定
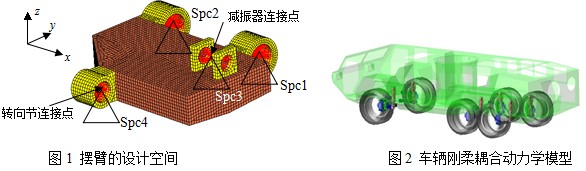
首先确定摆臂的设计空间如图1所示。采用动力学仿真的方法解决悬架摆臂边界载荷的加载问题。建立悬架摆臂为柔性体的车辆刚-柔耦合动力学模型,在HyperMesh中对摆臂几何模型进行结构简化及网格剖分,利用Craig-Bampton模态综合法对有限元模型进行动力缩减,并生成柔性体模态中性文件(.MNF),将建立的车辆悬架系统摆臂柔性体模型与刚体部件相连接,如图2所示。
进行车辆在F级随机行驶工况虚拟试验,获得悬架系统动载荷最大时间点的摆臂连接点三个方向的载荷,如表1和表2所示。表1和表2中的最终边界条件加载值为平均载荷值加上三倍的均方根值。

1.2 约束条件
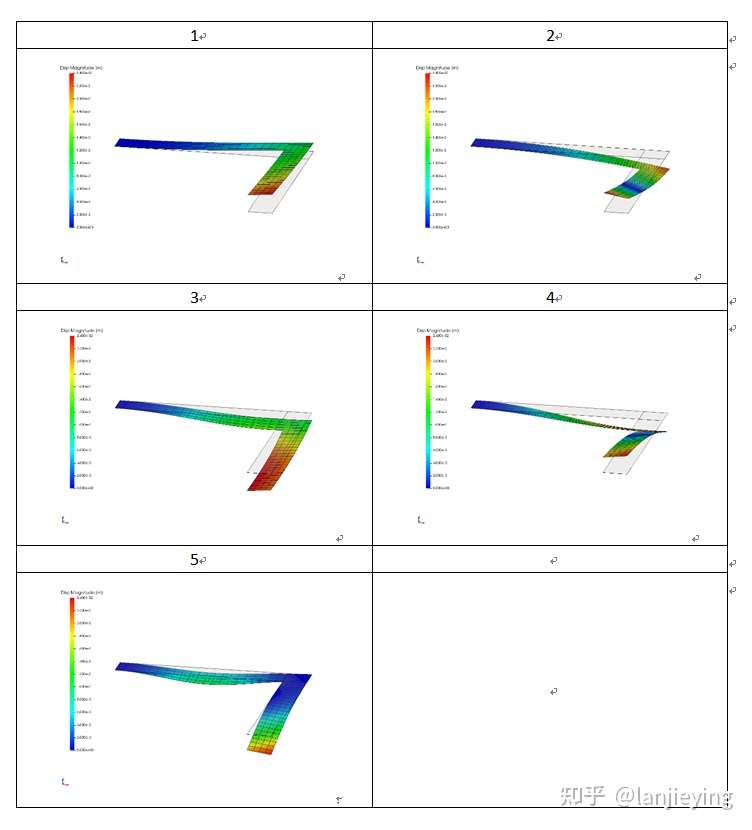
在摆臂与减振器连接点、与转向节连接点和与车体两个连接点分别建立多点约束单元,以便在刚-柔耦合动力学模型中与刚体构件连接。在工况1、2、3条件下,约束Spc1、Spc2和Spc4;在工况4、5、6条件下,约束Spc1、Spc2和Spc3;Spc1~Spc4都约束各点的三个平移自由度和y、z轴的旋转自由度,如图1所示。
2 数学模型的建立
2.1 固有频率的优化模型
自由振动工况下控制臂固有频率优化模型为:
式中:j为依据SIMP密度函数插值模型得到的控制臂材料密度,是一个介于0~1的量,为了避免刚度矩阵产生奇异,一般取 ;n为控制臂有限元模型的单元总数
;n为控制臂有限元模型的单元总数 ;;
;; 为结构第i阶频率特征值;
为结构第i阶频率特征值; 为所取模态的总阶数;
为所取模态的总阶数; 为第j个单元体积;V为设计空间的最大体积;K为系统的刚度矩阵;M为系统的质量矩阵;
为第j个单元体积;V为设计空间的最大体积;K为系统的刚度矩阵;M为系统的质量矩阵; 为第i阶的正交特征向量;f为控制臂的1阶弹性固有频率特征值。
为第i阶的正交特征向量;f为控制臂的1阶弹性固有频率特征值。