3.2硬点搜索算法
硬点搜索算法中包括有硬点位置搜索算法和硬点报告的自动创建。在硬点搜索时,需首先排除发动机罩下方没有硬件的区域,以缩小硬点的搜索范围,节省搜索时间,解决方法如图9,图10所示:
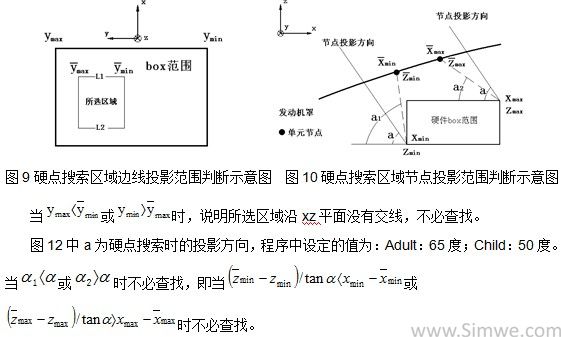
3.3模型自动定位算法
模型自动定位算法包括有腿部模型对保险杠定位算法、大腿模型对保险杠定位算法、大腿模型对发动机罩定位算法、头部模型对发动机罩定位算法。在大腿模型对发动机罩定位算法中,需要查曲线图表确定法规规定的碰撞角度、速度、动能,下面以角度为例对自动查表插值算法进行介绍。
程序将法规给定的模型碰撞速度曲线图表进行拟合转换为数学模型,如图11所示,以实现自动查表和自动定位,程序实现方法如图12所示。

程序步骤如下:
1) 计算得到保险杠前伸量:y2,若y2大于400mm则取为400mm,若y2小于0mm则取为0mm;发动机罩前沿参考线高度:x2;
2) 求出y2值对应的五个速度曲线上的值:X1,X2,X3,X4,X5;
3) 将x2,X1,X2,X3,X4,X5六个值从小到大排序,得出x2所在的区域,20km/h以下-区域0,20km/h至25km/h-区域1,25km/h至30km/h-区域2,30km/h至35km/h-区域3,35km/h至40km/h-区域4,40km/h以上-区域5;
4) 若在区域0速度为20km/h;若在区域5速度为40km/h,若在其它区域,用插值法求速度,例如若所求碰撞点所在的区域是4,该点的速度为35+L1/(L1+L2)*(40-35)km/h
4 算法验证
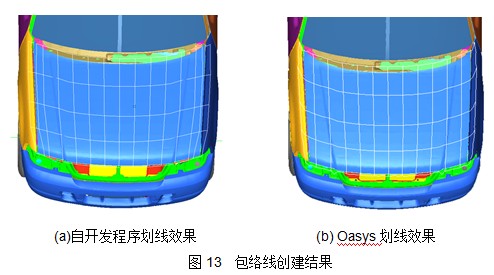
4.1参考线创建算法验证
为了验证所开发参考线自动划分程序的精确度,将其划分结果与Oasys软件的划分结果进行比较。如图13所示,表1将自开发程序划分的参考线上的10个节点与Oasys参考线相应节点的xyz坐标值进行对比。