1.2 模型试验验证
履带车辆动力学模型是否能够真实反映实车的动力学响应特性,满足工程仿真分析的需要,必须经过试验验证。
设置加速度测点在第六负重轮平衡肘处负重轮轴的工艺孔内,其测量方向为垂直方向,如图4所示。安装光电传感器在左侧主动轮,用来采集转速信号,如图5所示。
图4 第六负重轮轴加速度传感器 图5 光电传感器实车安装位置

试验工况为匀速直线行驶,选在驾驶场高速跑道上进行,跑道路面情况相当于B级随机路面。车辆发动机转速稳定在2000转/分,分别以2、3、4档位通过。仿真路面为B级随机路面。如图6、图7,模型仿真曲线与实车所测数据能够较好的吻合,验证了模型的真实性。

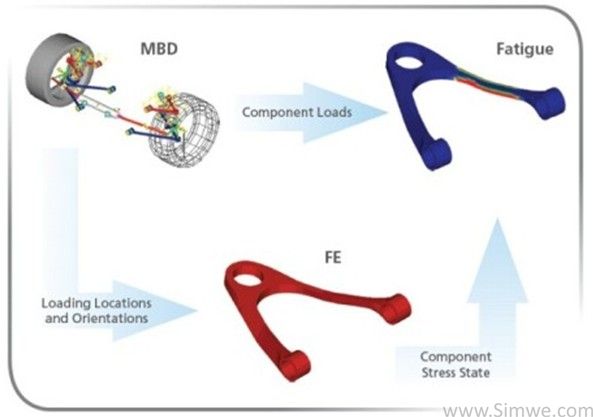
2 载荷相关性分析
作用在结构上的载荷是随时间变化的,这种加载过程称为载荷-时间历程。实际机械结构可以看作是有一定复杂程度的弹性系统,当系统上加载随时间变化的工作载荷,会激起系统的多个振动模态。在离加载点足够远的某一点的系统动态响应表现为应力(应变)-时间历程,它与载荷-时间历程相比较,在振幅、相位和频率上都不一样。这样的应力(应变)-时间历程包括有两方面的内容:外部载荷的作用和结构对这些载荷的动态响应。当不能直接测量观察外部载荷时,通过测量它在结构上某些特定点的反应来推导其载荷形式。
2.1 测点选择
从履带车辆的车体结构来看,负重轮轮轴处的载荷是通过平衡肘传递到车体上引起车体振动,因此,在平衡肘支座附近的加速度和该负重轮轮轴处载荷的相关关系较好。为了对其进行验证,在虚拟试验中,通过在平衡肘支座附近布置多个测点,然后分别计算各个测点加速度与负重轮轮轴处载荷的相关关系。
以左侧车体为例,在车体侧面布置网状点阵,在车体左侧面从前到后均匀分布了1200个测点,每行120个点,共10行,各个测点的间距为5cm。仿真后分别将每个负重轮处载荷与上述测点进行相关性比较,取出相关系数最大的前十个点。经过计算发现,各负重轮对应相关性最好的点均分布在各个负重轮平衡肘支座的正上方。为便于在实车试验中布置测点,选择测点位于车体外侧面,在平衡肘支座正上方,距平衡肘支座中心位置为0.2m,车体左右两侧加速度测点共12个。力的测量点共12个,位于各负重轮轮轴处。
2.2 试验数据处理以四档(38km/h)匀速直线行驶说明虚拟测试方法在整车载荷推断中的应用。路面模型采用E级路面。