前言
杯形谐波减速器依靠薄壁柔轮的弹性变形来进行传动,具有传动比大、体积小等优点,在各种机器人及精密机械传动等方面具有广泛的应用,而且在宇航空间机构中也得到越来越多的应用。如果能够进一步减小谐波减速器的体积,那么宇航空间机构中传动机构的体积也将减小,从而降低整个宇航空间机构的体积和质量。
为了满足空间环境、机器人、伺服控制系统等对谐波减速器中柔轮轴向尺寸小的要求,日本、美国和俄罗斯等国展开了研究,并取得了相应的成果。我国的 谐波传动技术与国外相比还有一定的差距,特别在短杯谐波的研制和在空间机构环境中的应用方面差距更大,短杯柔轮的谐波减速器目前处于研发阶段,未见有产品 应用的实例。
决定杯形谐波减速器寿命的核心部件是薄壁柔轮,JOHN减小杯形谐波减速器的体积也主要是通过缩短柔轮的长度来实现,因此,研究柔轮的关键结构参 数对柔轮的应力影响规律是对柔轮结构进行优化设计和改进的重要前提条件,同时也是综合分析柔轮应力的基础;在不同的温度下分析柔轮的热和结构耦合应力,确 定谐波传动能够承受的环境温度,可为杯形谐波传动应用于宇航空间机构提供依据。
预期通过基于ANSYS的杯形柔轮结构参数对柔轮应力的敏感度分析,确定短杯柔轮各主要的参数的取值范围,然后利用优化设计得到短杯柔轮的结构参 数,按照该参数加工出一套短杯谐波减速器,对其性能进行试验测试,并将试验结果与正常杯形的谐波减速器进行比较,期望得到町用于实际工况的短杯谐波减速 器。因此,分析柔轮关键结构参数对柔轮应力的影响以及热与结构耦合情况下柔轮的接触应力分析具有重要意义。
1 柔轮与波发生器参数化等效接触模型
1.1参数化等效接触模型的开发
如果对不同型号的柔轮与波发生器进行有限元接触分析,以及改变柔轮关键结构参数对柔轮最大等效应力的影响分析,总共需要计算分析几十次。如果每分 析一次就建立一个新模型进行单元类型定义、网格划分、施加约束和载荷,最后进行分析,那么分析的工作量是不可想象的。因此,有必要对柔轮和波发生器的接触 模型进行参数化建模,并自动完成网格划分和分析。
如果建立的接触模型是带有轮齿的,那么网格划分、计算的工作量也是很大的,因此,需要对柔轮的轮齿部分的壁厚进行等效处理。对于柔轮轮齿部分壁厚 的等效处理方法是,采用将轮齿部分简化为具有一定厚度的光滑圆环来代替轮齿部分的壁厚。齿圈壁厚处的抗弯刚度约为齿根处光滑环处的1.67倍。因为齿圈壁 厚处的抗弯刚度与壁厚的三次方成正比,所以,可以对齿圈壁厚进行等效,等效后的齿圈壁厚应为齿根处光滑环壁厚的 倍。柔轮在静载时属于空间对称和载荷对称情况,所以可以针对柔轮的四分之一模型进行分析,节约了计算时间。
倍。柔轮在静载时属于空间对称和载荷对称情况,所以可以针对柔轮的四分之一模型进行分析,节约了计算时间。
等效处理后,柔轮所受的最大应力称为柔轮最大等效应力,柔轮光滑圆筒所受最大应力称为柔轮光滑圆筒部分最大等效应力。
进行有限元建模时,采用自底向顶的建模方式,这种方法是指创建模型时首先通过最低级图元关键点来创建高级图元线,再由线创建面,由面创建体的一种 建模方法,这种方法的最大好处就是模型比较容易实现参数化。通过这种建模方法实现了四分之一柔轮和波发生器等效接触模型的参数化,并使用ANSYS的 APDL语言编写了柔轮与波发生器参数化等效接触模型的程序。
为提高计算速度,在建立ANSYS的柔轮与椭圆凸轮的接触分析模型时,通用的做法是忽略柔性薄壁轴承的影响,将波发生器看作刚体,用一个与波发生器轮廓线和轴向长度相同的刚性柱面来代替。波发生器采用椭圆波发生器形式,属双波传动,柔轮与波发生器的接触结构图如图1所示。
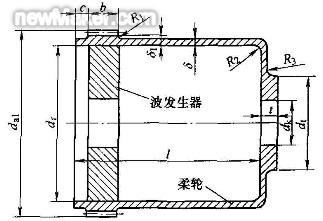
图1 柔轮与波发生器的接触结构图
对四分之一柔轮与波发生器的等效接触模型施加约束和载荷;对波发生器的内孔和柔轮的后端圆孔施加固定约束,波发生器与柔轮的四分之一两截面施加对称约束。安装波发生器与柔轮时,保证准确的过盈量,波发生器的长轴为 ,短轴为
,短轴为 。其中以dn为柔轮内径,
。其中以dn为柔轮内径, 为径向变形系数,取值为l,m为柔轮模数,柔轮与波发生器的等效接触模型如图2所示。
为径向变形系数,取值为l,m为柔轮模数,柔轮与波发生器的等效接触模型如图2所示。
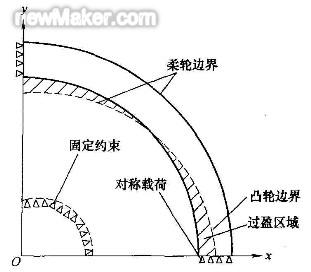
图2 柔轮与波发生器的等效接触模型图
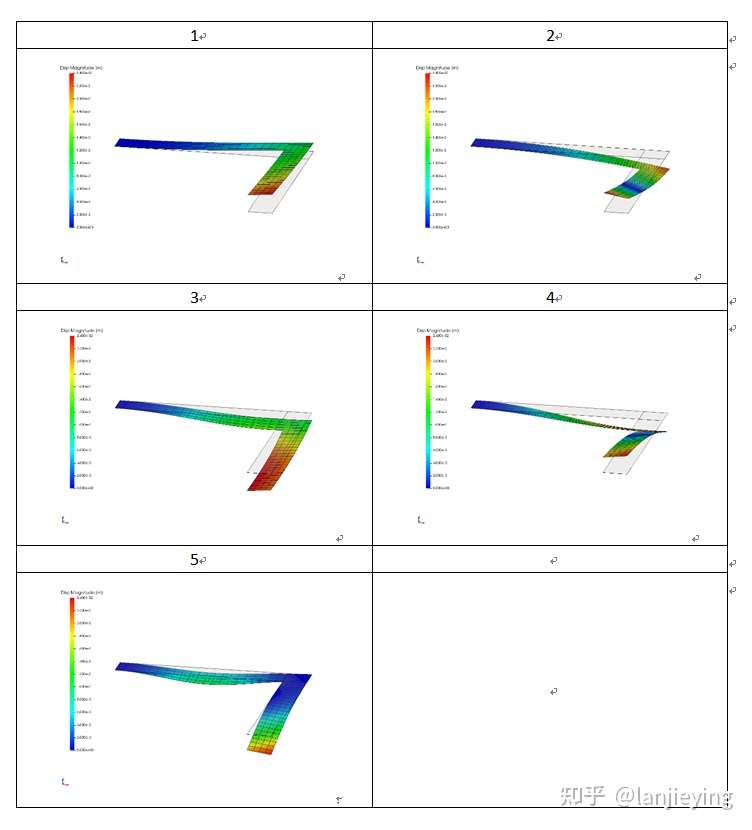
考虑到柔轮和波发生器作用的复杂性,很难确认作用时力的分布,也很难确认柔轮内壁位移分布,因此考 虑使用接触分析。柔轮和波发生器接触时,将柔轮和波发生器的装配模型视作一个“刚体一柔体”的“面一面”接触模型。波发生器作为目标面,单元类型选用 Targel70,柔轮内壁作为柔性接触面,单元选用Contactl74。柔轮的最大径向变形与柔轮壁厚比大于0.2,是一个大变形非线性问题,因此求 解选项设置为大变形结构分析。为了提高分析精度,防止出现不收敛,打开自动载荷步选项,并设置载荷步为4,最大载荷步为20,最小为1。图3为通过参数化 界面输入参数之后生成的32机型的柔轮与波发生器等效接触模型的模型图、网格图、等效应力云图和变形云图。
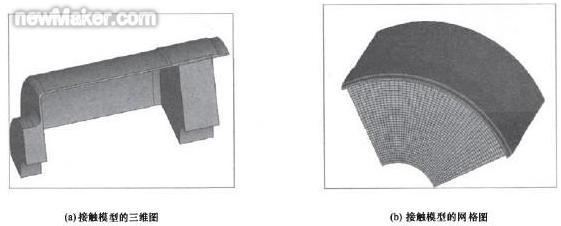
图3 柔轮与波发生器的等效接触模型图、网格划分图
1.2参数化等效接触模型的验证
按照上述的基本参数计算完成之后,在PRO/E中建立了与图4所示32机型谐波减速器具有相同参数、但是带有轮齿的模型,然后导入ANSYS软件 中,按照前述方法进行了单元类型和材料属性定义、网格的划分、约束载荷和接触对的创建,最后进行设置求解。分析完成的等效应力云图和变形云图如图4所示。
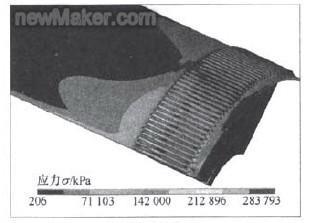
图4 柔轮与波发生器接触模型的应力云图