摘要:以车辆的振动模型为例,探讨了结合MATLAB软件和虚拟现实编程语言在振动问题中的应用。将车辆简化为在铅直平面内的两自由度模型,通过虚拟现实编程语言创建模型构件的三维模型,并与MATLAB的仿真工具包Simulink接口。建立了仿真模型,并得到了仿真模型在给定的初始条件下的响应,以动画的形式直观地表达出来。虚拟现实技术的应用,使得抽象的振动问题和数学公式变成直观的运动,其仿真结果符合结构的振动规律,表明虚拟现实技术对于振动问题的仿真是可行的。
0 引言
虚拟现实(VirtualReality)简称VR,是近年来出现的高新技术,也称灵境技术或人工环境。虚拟现实是利用计算机技术模拟产生一个三维空间的虚拟环境,提供使用者关于视觉、听觉、触觉等感官的模拟,如同身临其境一般,可以及时、没有限制地观察三度空间内的事物[1]。
基于虚拟现实技术的直观性,它被广泛地用于城市规划、医学、矿山、军事、航天工业、艺术与教育等行业中[25]。本文是对虚拟现实技术在振动力学问题的研究中的应用进行初步探索,通过虚拟现实技术来实现振动系统的可视化,更便于人们去研究振动问题,这在生产实践中是很必要的。所以通过虚拟现实技术来实现振动的可视化不仅有其理论意义也有其现实意义。
1 振动系统的理想化力学模型的建立
一个振动系统究竟简化成几个自由度的振动模型,要根据系统的结构特点和所研究的目的来决定。例如,研究车辆在铅直面内的振动时,可以将系统简化为如图 1(b)所示的模型,刚体爛爜代表车身,它的位置可以由质心爞偏离其平衡位置的铅直位移牪爞及绕质心的转角犤来确定。这样,车辆在铅直面内的振动问题就被 简化为一个两自由度的振动系统。

图1 车辆在沿直面内的振动模型
自由振动的微分方程为:
 (1)
(1)
为了研究方便,模型参数取m=1,Ic=1,k1=1,k2=1,l1=l2=2,刚体的初始高度为2,则该模型的运动微分方程为:
 (2)
(2)
2 利用VRML实现三维模型的创建
2.1 地面的建立
在VRML建模的过程中,可以在原点画个很薄的板来代替地面[1],地面的尺寸是个长为6,宽为4,厚为0。5的长方体薄板,在VRML语言中创建长方体的语句是
Box{
Size 6 4 0.1
}
2.2 车身的建立
将车身简化为长方体,假设其尺寸为:长为2,厚为0.5,宽为0.5.不过在建立车身模型的时候,需要将坐标向上平移2,在平移后再创建长方体,创建长方体的语句和创建地面模型一样。平移的语句为
Transform{
translation 0 0 2
}
2.3 弹簧的创建
弹簧的创建较为复杂,创建弹簧需要先创建一个个离散的点,最后再将一个一个的点连接起来[6],弹簧的创建位置为质心爞的两边1.8的距离。
2.4 模型与Simulink接口的定义
在本模型中需要给3个物体定义接口,第1个是刚体爛爜,然后是两个弹簧。在刚体的接口中,有刚体的平移translation 和刚体的转动rotation,如果不对刚体定义中心转点的时候,系统默认的点就是在创建刚体时的坐标原点。因此,在本模型中,不需要定义中心转点,因为 刚体的转轴就是刚体的中心点,刚好是系统的默认点。在两弹簧的接口中,只有一个压缩,因为弹簧没有平移和转动,只有刚体运动对弹簧产生的压缩[7]。车辆 振动的VRML三维模型如图2所示

图2 车辆振动的VRML三维模型
3 利用Simulink建立振动仿真模型
3.1 振动微分方程的导入
在应用Simulink进行仿真的时候,导入的微分方程要形成一个闭环。在此模型的Simulink仿真中,需要导入的方程为式 (2), 在对方程导入的过程中,需要把其分为上下两个方程。进入MATLAB的Simulink仿真模块中,建立一空白模型,在窗口中从Simulink模块库中 添加模块。在方程导入的过程中需要用到积分模块integrator,加法模块sum,增益模块gain。创建的方程如图3所示。
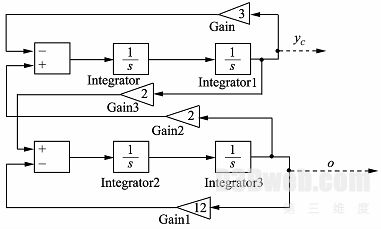
图3 振动方程的Simulink模型
3.2 振动方向的控制
从图3中可以看出有两个输出,分别为牪爞和刚体转角犤,但是这两个输出都是标量,不能控制刚体的运动。因为VRML无法识别运动方向和转动轴,所以要对其 进行向量化。在对牪爞向量化时,只需要用牪爞的值乘以一个表示方向的向量就可以了,可以乘以(0 1 0),因为刚体的平移是牪方向的。在对角度向量化时,它和位移的向量化是有所不一样的。一个物体的转动,需要用两个量来表示,一个是转动的大小,这是一个 标量;另一个是转动轴的方向,这是个矢量,需要用到mux模块,这是个将两种信号合成的模块,它可以使得角度的输出和转动轴两种信号合成,其中转动轴的方 向为(0 0 1),即绕牫轴。